Roborodentia <-Back
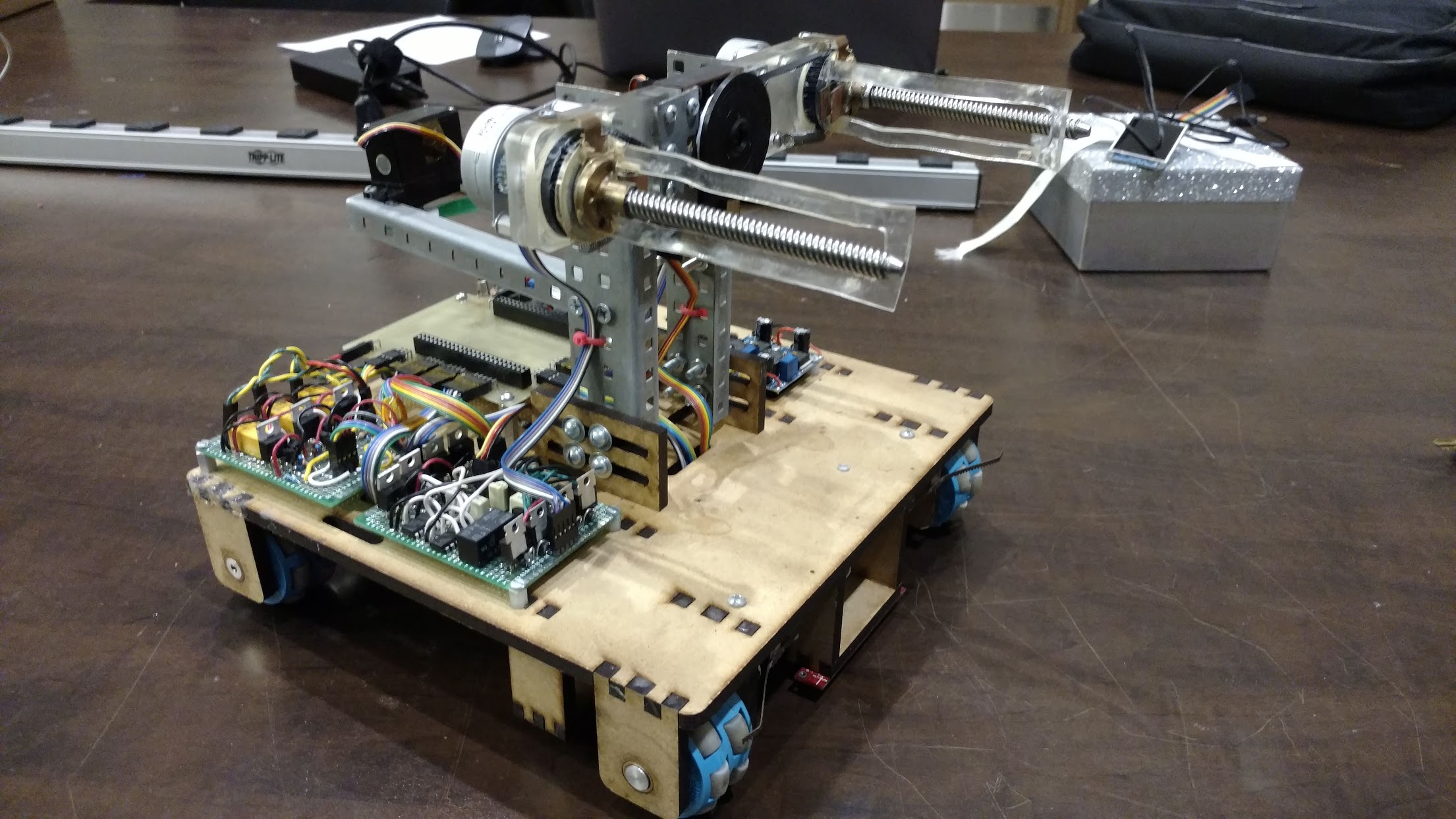
Robotics competition hosted by Cal Poly. I competed in 2017 and 2018. Teams must create a robot with whatever materials they like to play a game which varies from year to year. The 2017
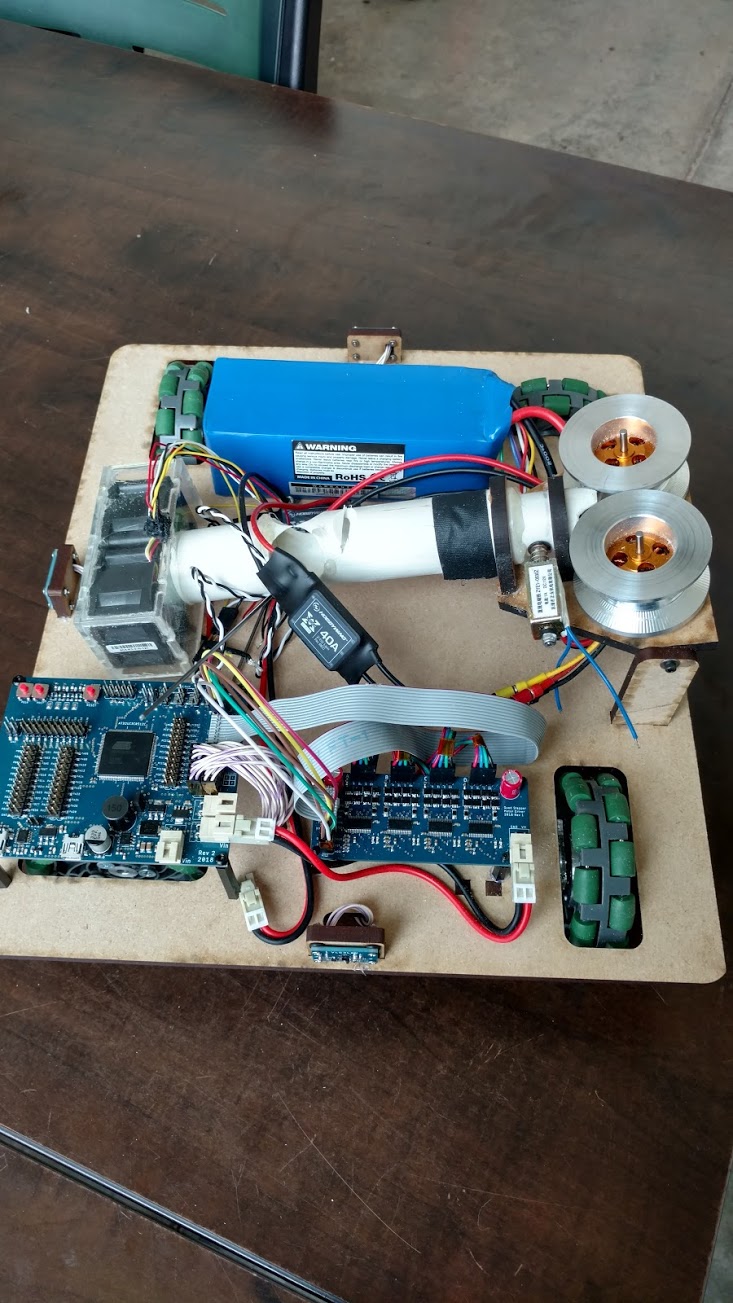
competition requires robots to navigate a field while picking up plastic rings and placing them on posts. The 2018 competition required robots to navigate a feild while picking up Nerf rival balls and shooting them
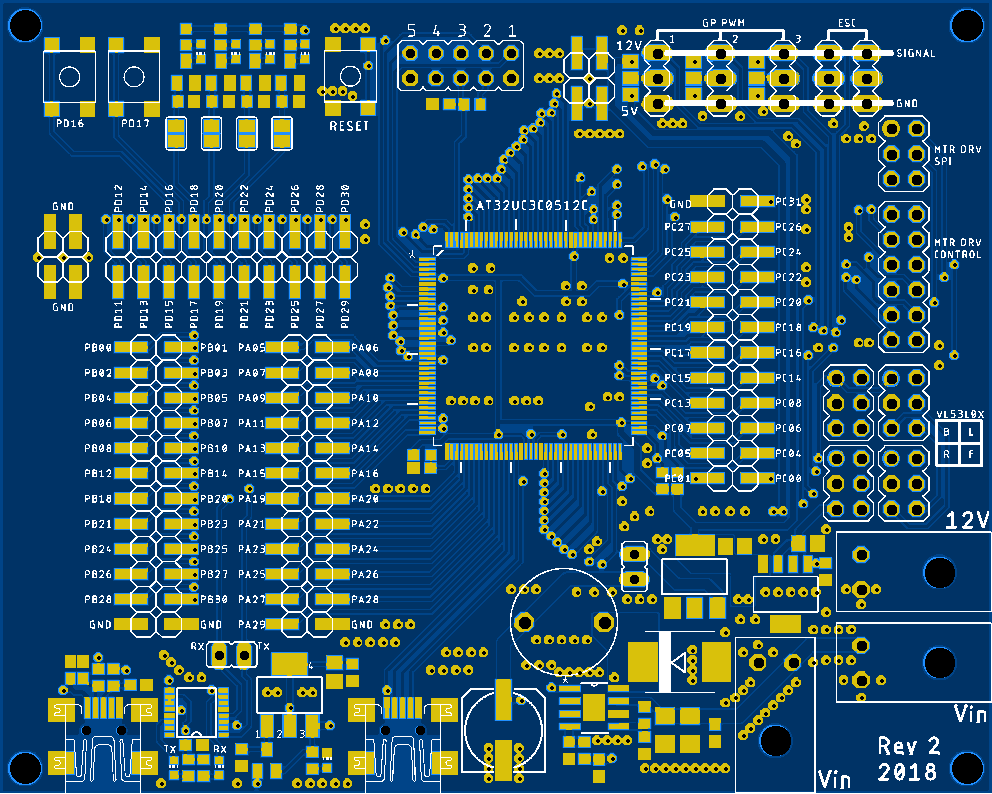
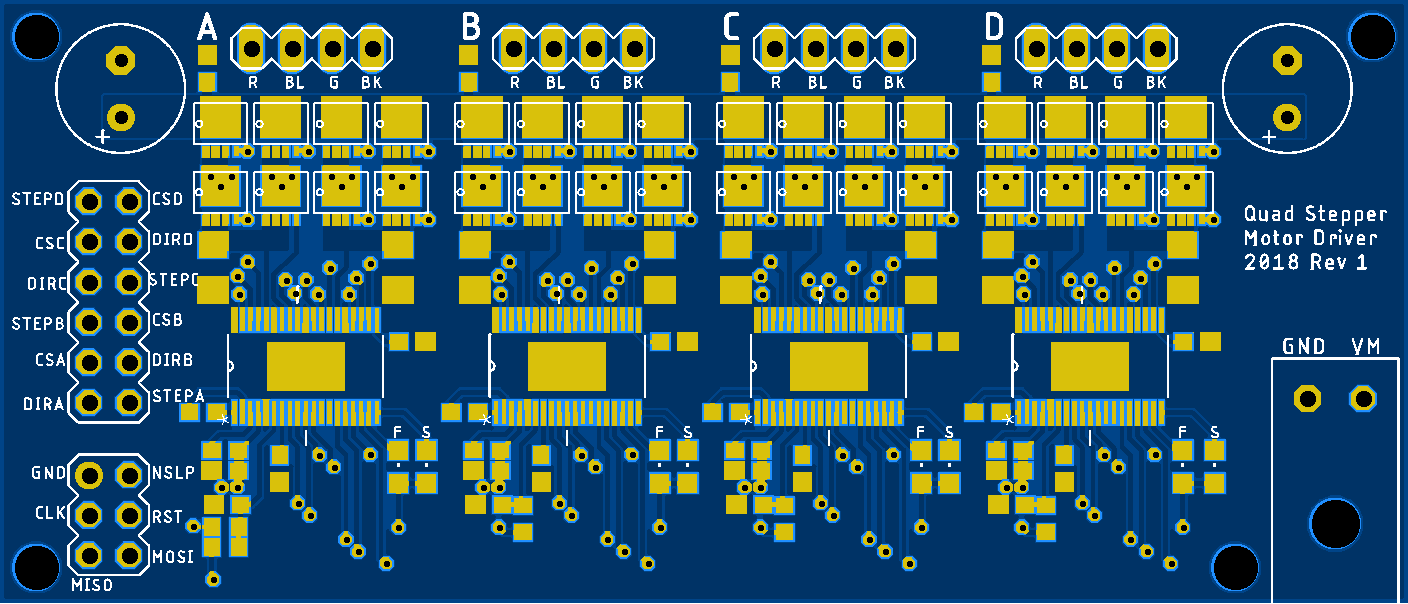
into nets. The 2017 robot is in the first picture. The 2018 robot (pictured in unfinished state) is in the second. Just for fun, I built dc motor and stepper motor drivers from scratch in 2017. In 2018, I made a custom PCB
dev board for the AVR32 microcontroller we used as well as a quad stepper motor driver and time of flight sensor boards(blue boards). The 2017 robot used a STM Discovery F4 dev board.