Autonomous Golf Cart <-Back
This is an autonomous golf cart project that I was involved in all four of my years at Cal Poly. We added a LiDAR, stereo vision camera, GPs, IMU, and wheel speed sensors to an old golf cart with the goal being to develop a self-driving
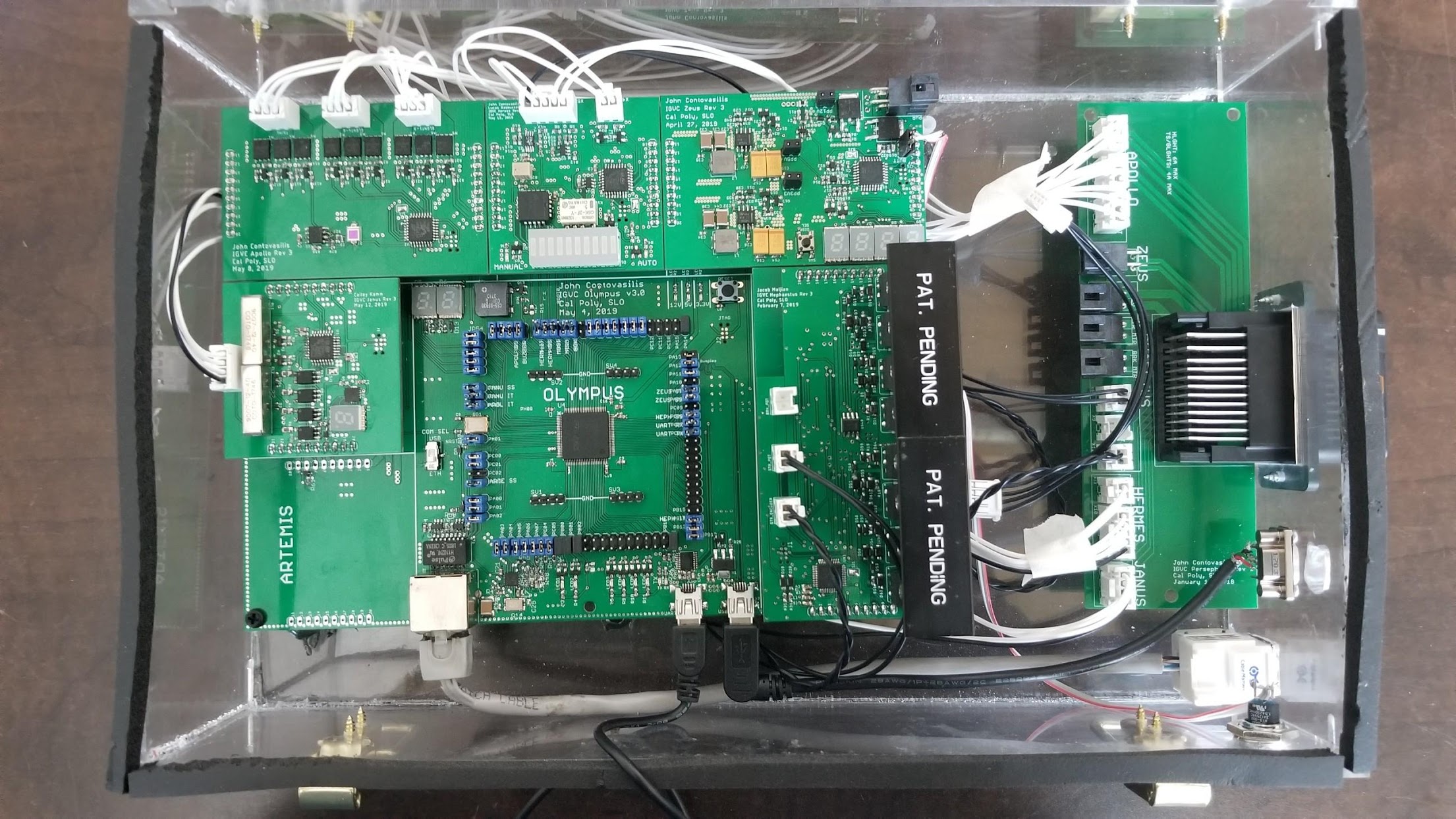
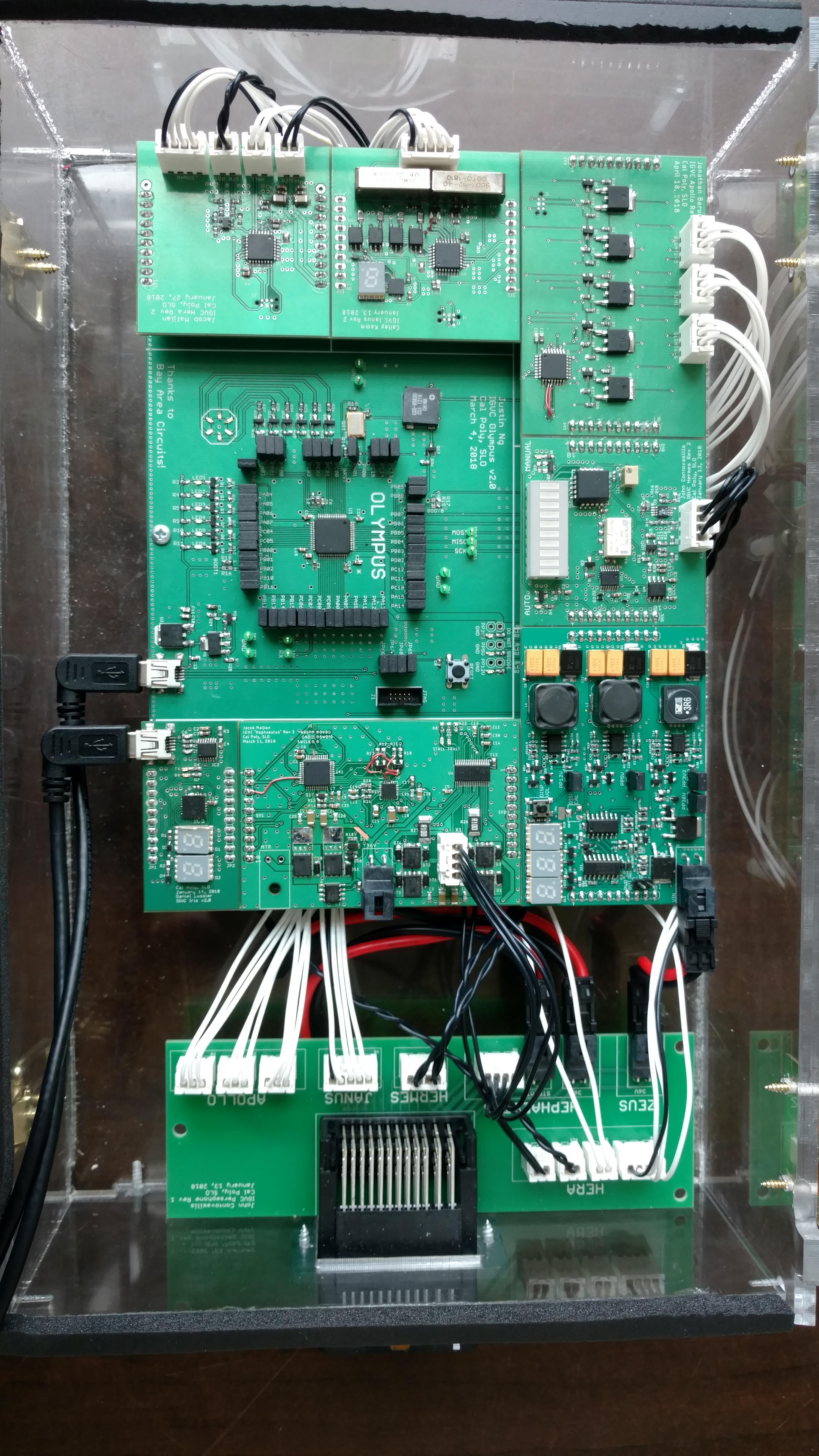
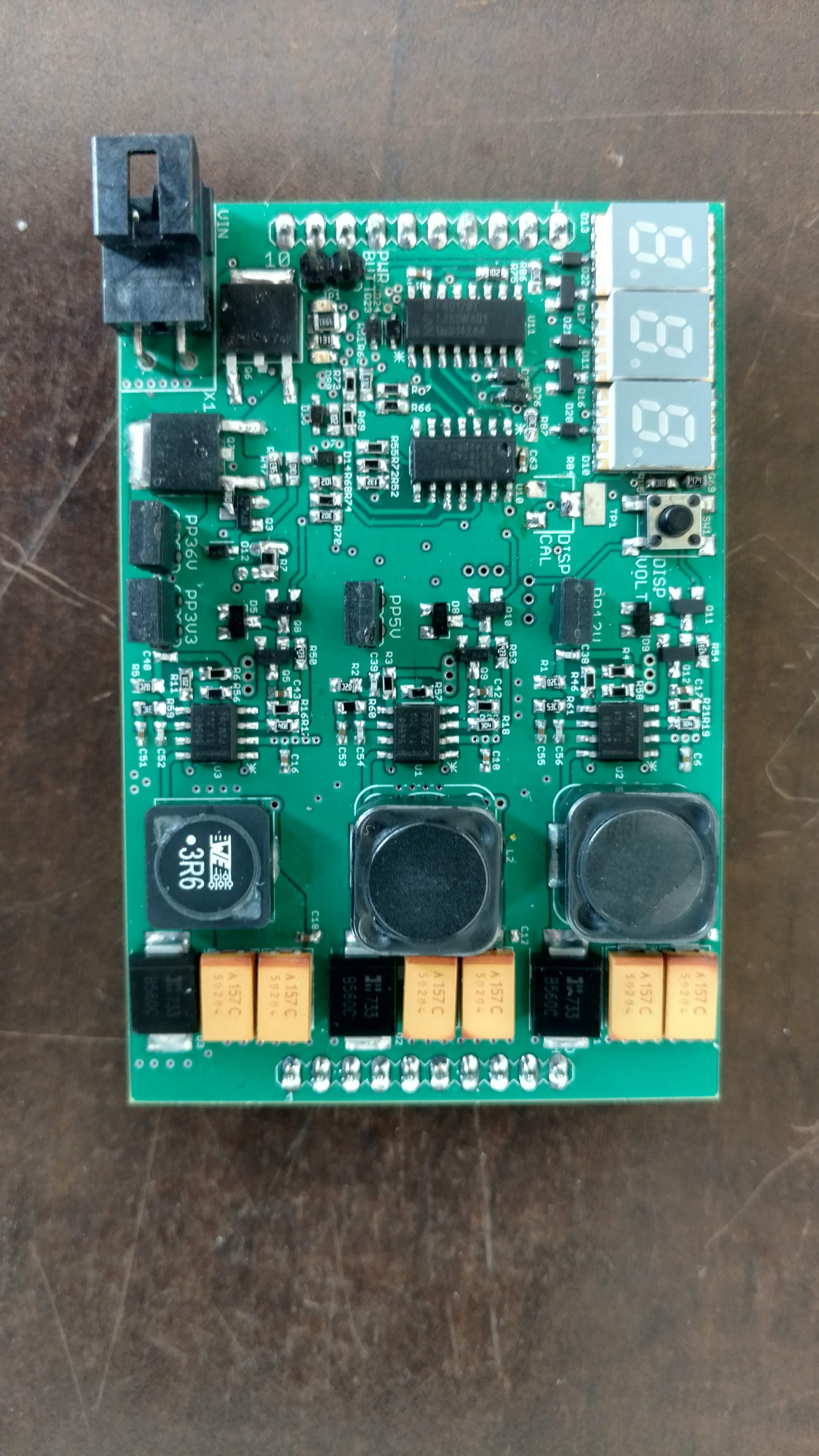
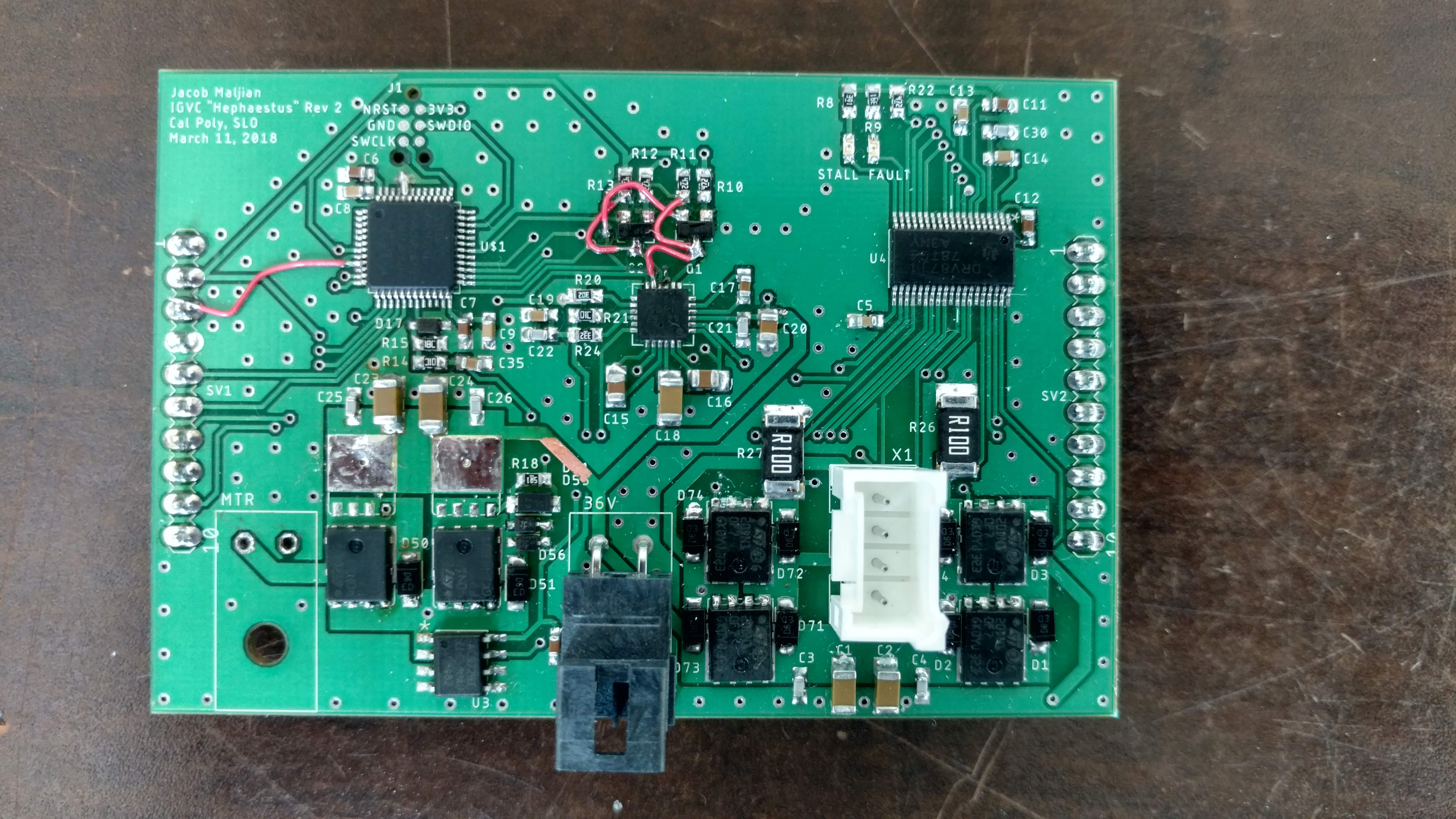
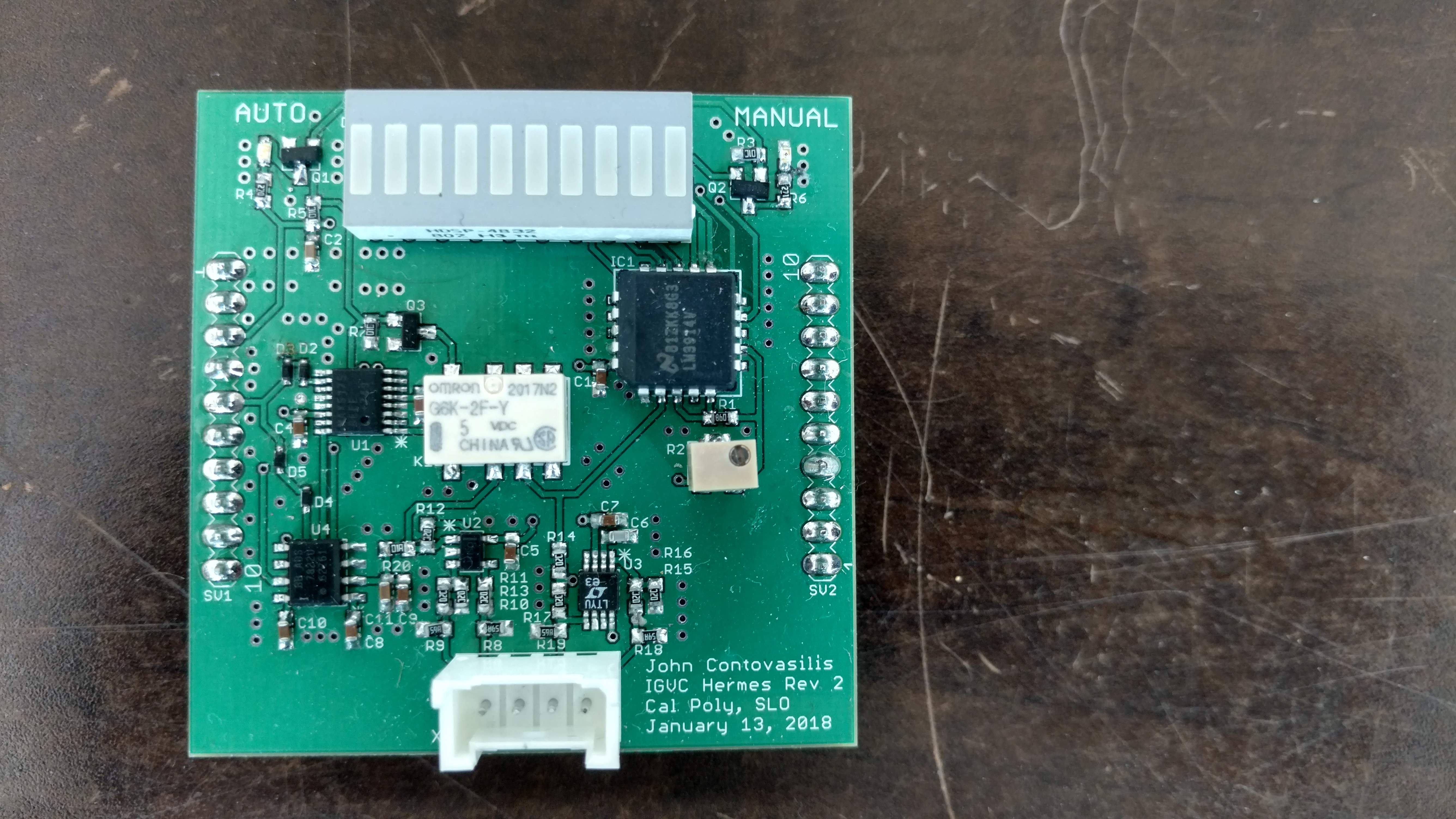
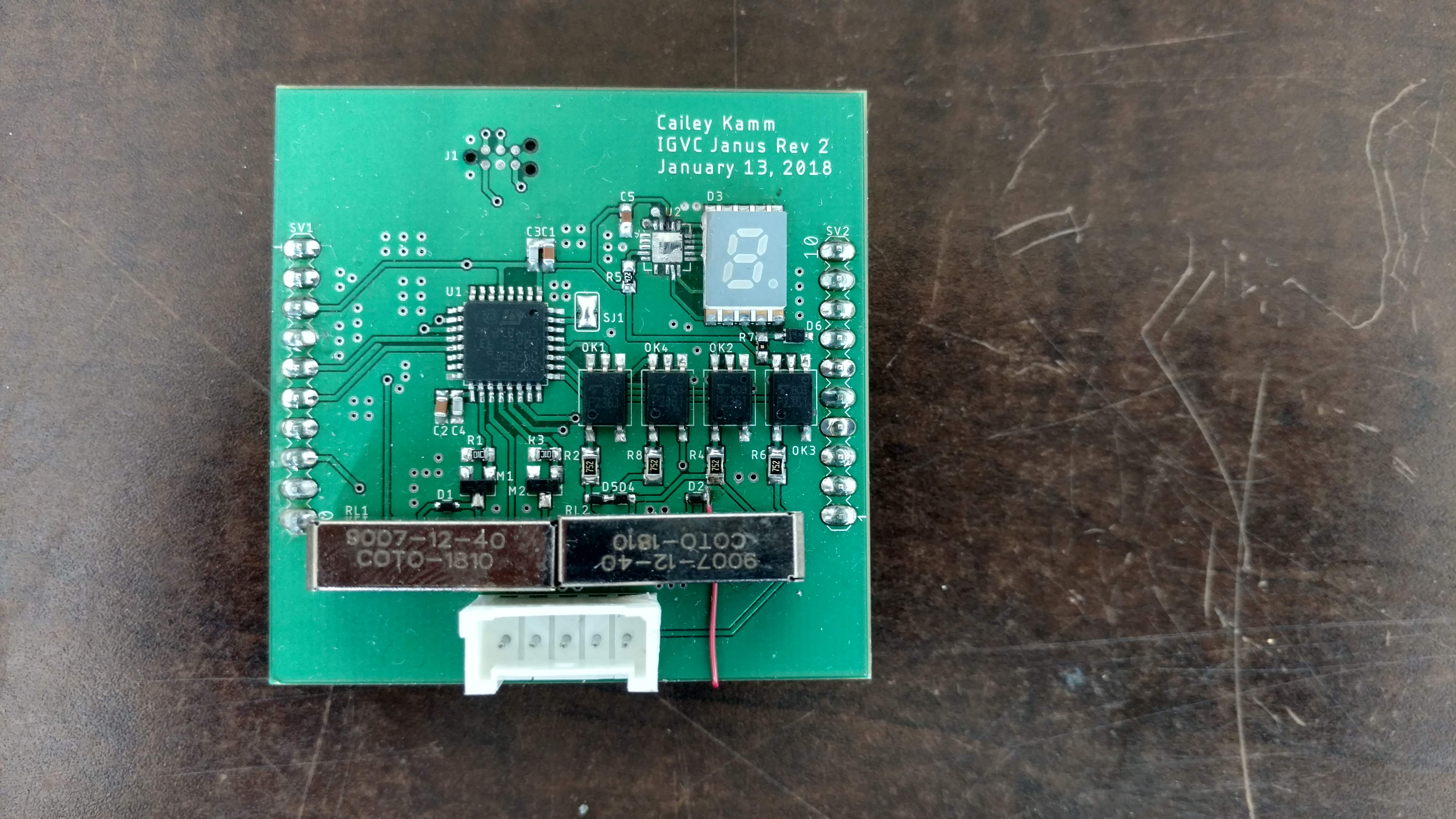
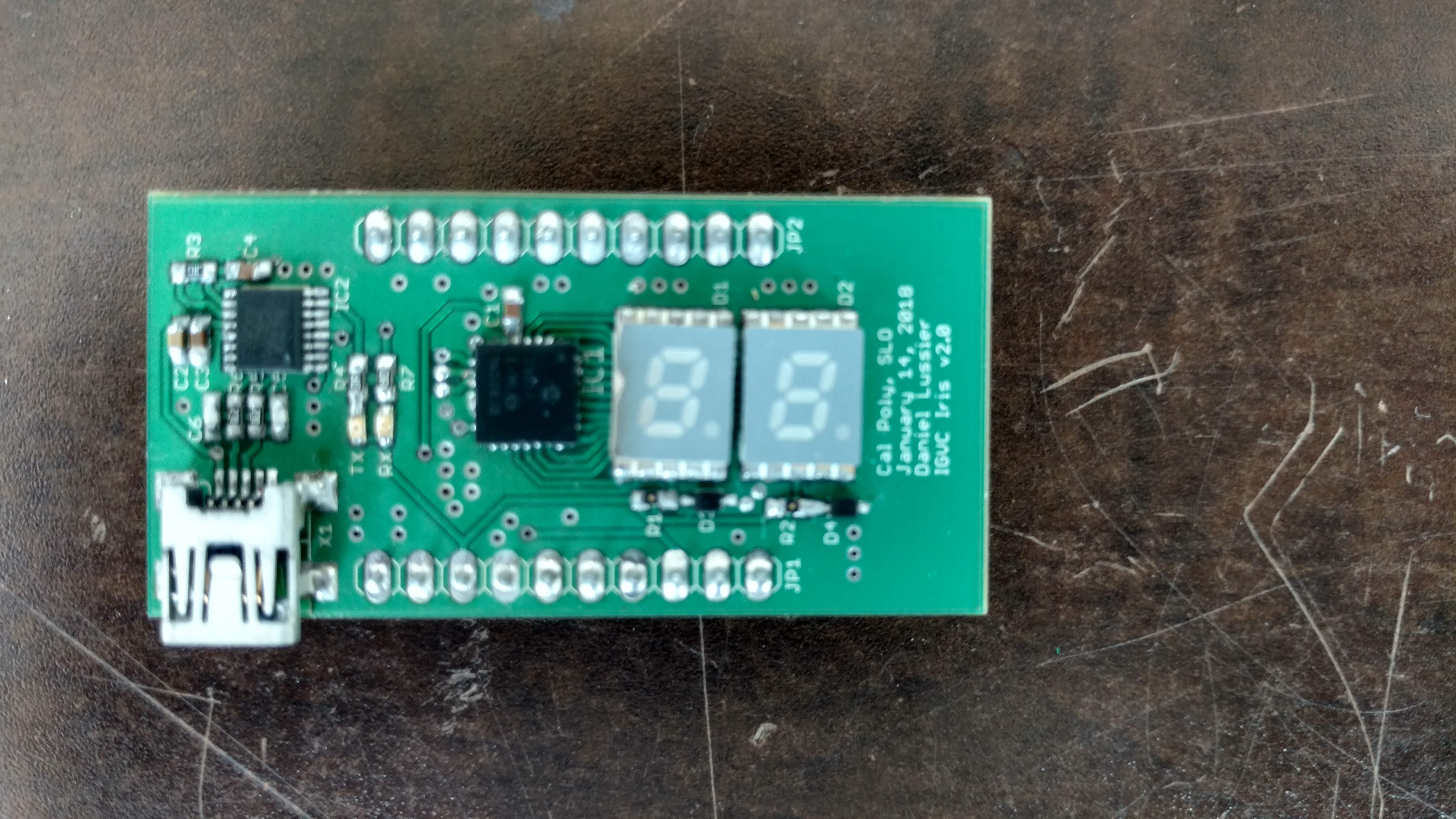
platform. We designed and built a modular control board to interface all of the golf cart hardware and sensors with a computer. I took the lead role in designing, building, and testing this hardware for 2 of the 4 years I worked on this project.